当研究室では、持続可能な社会の実現に向けて、以下のような研究テーマに取り組んでいます。
高齢化社会を維持する支援技術・自動化技術
ロボットの知能化の研究
人を支援するロボットや柔らかい機構・制御の研究
建設機械の高レベル自動化の研究
機械学習を利用した環境認識・動作計画の研究
気候危機の解決に資する技術
省エネルギーな電気-機械エネルギー変換
新原理による電気-機械エネルギー変換
気候制御を実現する電気・機械・熱エネルギー変換
主にロボットや電気機械システムを対象とした制御応用や、生産システム等を対象としたシステム最適化の研究を行っています。中でも、現代社会において重要課題となっている少子高齢化問題に関連して、
高齢者の自立支援や医療従事者・介護従事者の負担軽減を目的としたロボットの研究や、
品質向上を目的とした制御パラメータの自動チューニングの研究、
生産性向上を目的とした様々な無人建設機械車両の最適動作計画の研究に取り組んでいます。
また、気候危機に関連して電動車両やロボットの駆動ユニットの省エネルギー化の研究のほか、台風に介入し減災を実現する工学的手法の研究や台風発電の研究に取り組んでいます。
研究シーズの社会実装も積極的に進めており、多くの国内外の企業との共同研究も実施しています。
データ駆動型シミュレーション

数組の入出力の実験データのみから制御系をチューニングできる手法として、データ駆動型制御が注目されています。
この手法では制御対象の数学モデルを導出する必要がないため、制御系の構築が容易になります。
研究室では、畳込み演算に基づく新しいデータ駆動型シミュレーションおよび制御器設計法を提案しています。非常に簡単な演算のみで制御対象の挙動を推定することができ、
オーバーシュート量や整定時間など様々な評価関数を最小化することができます。
これにより、多くの産業システムにおいて制御性能の向上や制御システムのチューニングの労力削減が可能になります。
特許7256327
バイラテラルドライブギヤ

協働ロボットのように人と接触する可能性のあるロボットアームでは、環境から加わる外力に対して柔らかく動くことが求められます。
外力に対する関節アクチュエータの動きやすさのことをバックドライバビリティといいます。
従来の高減速比ギヤが用いられてる従来の関節アクチュエータはほとんどバックドライブできないため、
内蔵したトルクセンサと制御を組み合わせたり、
弾性要素を導入したり、
大トルクモータと低減速比ギヤを組み合わせたりしてバックドライバビリティを実現していました。
本研究室では、複合遊星減速機の歯数と転位係数を最適化することで、減速比が高くても高効率でバックドライブ可能なバイラテラルギヤを提案・開発しています。
特許 JP6782494B2,
US11181170B2
CN109312823B
自律移動ロボット

近年、自律移動ロボットのサービスロボット分野での利用が進んでいます。
現在の自律移動ロボットでは、事前に走行環境の地図を作成する必要があり、未知環境や動的環境での走行に課題があります。
本研究室では、LIDARを用いた自律移動ロボットの自己位置推定、地図構築、軌道計画の研究をベースとして、
歩行者の検出とその軌道の推定、抽象化された簡易地図情報のみを利用した走行計画、
地図情報からの経路抽出、などの研究を行っています。
アシストロボット

人を支援するロボットとして、杖型ロボット、歩行器型ロボット、バックパック型トルク発生器、外骨格型ロボット、座面型ロボットなど、様々な形態の支援型ロボットの研究を行っています。
オリジナルハードウェアの機械設計・製作から、回路基板の製作、制御アルゴリズムの構築、検証まで幅広く取り組んでいます。使用者の意図抽出を行い、適切に制御パラメータに反映させる研究も行っています。
特許7108298
高密度簡易空冷モータ
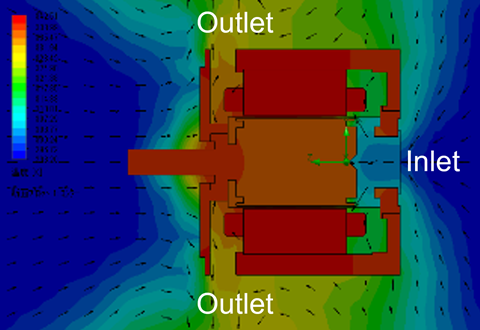
トルク密度を向上させるために、ロータ軸に簡易的な遠心ファン構造の加工を施した空冷モータを提案しています。
ロータ軸端の孔から取り込まれた空気は、エアギャップおよび巻線スロットを通り、ハウジング外周の孔から排出されます。
この簡易遠心ファンは、ロータ軸の軸方向に穴あけ加工を行い、
半径方向に複数の貫通孔の加工を行うのみの簡易でコンパクトな構造で、
巻線や永久磁石の熱を効率的に除去することができ、高出力密度、高トルク密度を実現することができます。
特許7164881
共振モータ

誘導機の固定子と回転子から鉄心をなくし、
コイルのみからなるエアコアモータの基礎研究を行っています。
鉄心がないため固定子巻線と回転子巻線の間の磁気結合が非常に小さくなりますが、
固定子巻線と回転子巻線にそれぞれ接続したキャパシタと巻線インダクタンスとの間で大きな共振電流を発生させることでトルクを発生させることができます。
MRI検査室のような、磁性体を持ち込むことのできない空間での利用が想定されます。
特許6537930
スパイラルモータ
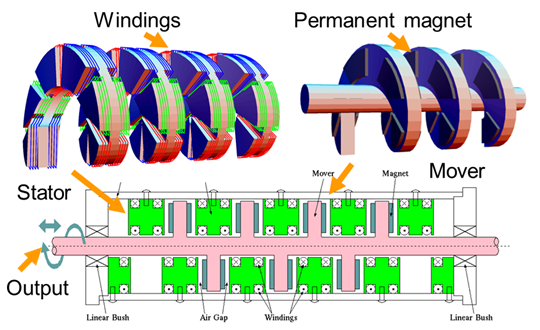
直動アクチュエータには、油圧、空圧、回転型モータ+運動変換機構、リニアモータなどの種類があり、近年では保守性の観点から油圧から電動アクチュエータへの置き換えが進んでいます。
本研究室では、可動子および固定子がらせん形状をしたユニークな構造のスパイラルモータを提案・開発しています。可動子が固定子の中をらせん運動し、そこから直線動作のみを取り出して利用します。可動子と固定子の対向面積を大きくとれるため、従来の同一体積のリニアモータと比較して大きな推力が得られ、かつ、ギアがないため機械損が少ないという特長があります。
特許 JP3712073B2,
US7176590B2,
CN100466426C,
EP1560320A4,
AU2003275656A1,
KR100720266B1
9スイッチインバータ

通常、3相負荷を駆動する3相インバータは6つのパワーデバイスから構成されます。
本研究では、2つの独立した3相負荷を9つのパワーデバイスで駆動することのできる9スイッチインバータを提案しています。
パワーデバイスの数を3/4に減らすことができます。
ただし、電圧利用率が低下する欠点があるため、
低電圧のアプリケーションに適しています。
負荷の数を増やした12スイッチインバータなどのバリエーションもあります。
そのほか、マルチレベルインバータの研究も行っています。
特開2009-050042